

I started my Engineering and Physical Sciences Research Council (EPSRC) ICASE PhD of Computer Science in March 2020. Previously, I completed an MEng in Mechanical Engineering at the University of Bristol in June 2018.
Coming from an engineering background with a strong interest in artificial intelligence (AI), this ICASE programme allowed me to delve into AI for autonomous systems, with an industrial lookout.
My PhD focused on the rapidly growing field of continual learning. Continual learning refers to a machine learning paradigm in AI, where a model learns from a stream of data over time, adapting its knowledge to new information while retaining useful knowledge acquired from previous data.
Catastrophic forgetting is a phenomenon associated with continual learning, where a model tends to lose its previously acquired knowledge when exposed to new information.
Specifically, this happens in two common scenarios:
- if the new information is completely unrelated to the previously acquired knowledge
- if the old and new information are related but there are only a few examples to describe the new information
The latter case, which is our focus, occurs because the model adjusts its parameters to fit the new data based on a few examples overwriting the representations associated with previously learned information. These few examples are often not sufficient to statistically describe the entire distribution of information, resulting in the model learning a poor representation of the new information.
The role of transfer learning
Transfer learning is a concept that leverages knowledge gained from solving one task to improve performance on a different but related task.
In traditional machine learning approaches, models are trained from scratch for specific tasks, requiring large amounts of labelled data. Transfer learning, however, allows pre-trained models, often developed on large datasets for a particular domain, to be fine-tuned or adapted for a new task with limited labelled data.
This process enables the model to generalise better and perform well in diverse scenarios. The importance of transfer learning lies in its ability to mitigate the data scarcity problem and accelerate model training for new tasks. It facilitates the reuse of knowledge learned from one domain in another, reducing the need for extensive datasets and computational resources.
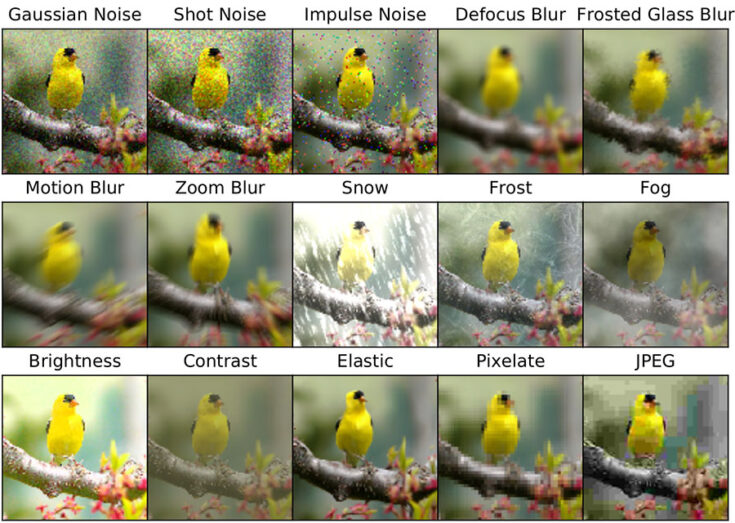
Figure 1: examples of 15 common types of corruption that require domain adaptation. Picture taken from Hendrycks, Dan, and Thomas Dietterich. ‘Benchmarking neural network robustness to common corruptions and perturbations.’ arXiv preprint arXiv:1903.12261 (2019).
Our research approach
The PhD research specifically developed methods for machine learning models to achieve continual domain adaptation using few samples (see figure 1), while mitigating catastrophic forgetting using transfer learning techniques.
Our approaches specifically looked at how model parameters important for transfer learning can be controlled during retraining to allow for successful adaptation to target domains using few samples available for retraining.
See figure 2 for an example of online adaptation of a neural network using one of our developed approaches to four target domains. Our developed methods have shown to improve the accuracy of continual learning models by approximately 25% on average between different target domains, and around 40% for some specific target domains.
As can be seen in figure 2, when adapting to ‘contrast’ noise to model accuracy improves by more than 40% as more samples become available. This is a significant step towards allowing autonomous systems employing machine learning models to adapt during operation without the need for a human-in-the-loop, making their utilisation in autonomous systems cost-efficient and permitting their usage in a large scale.
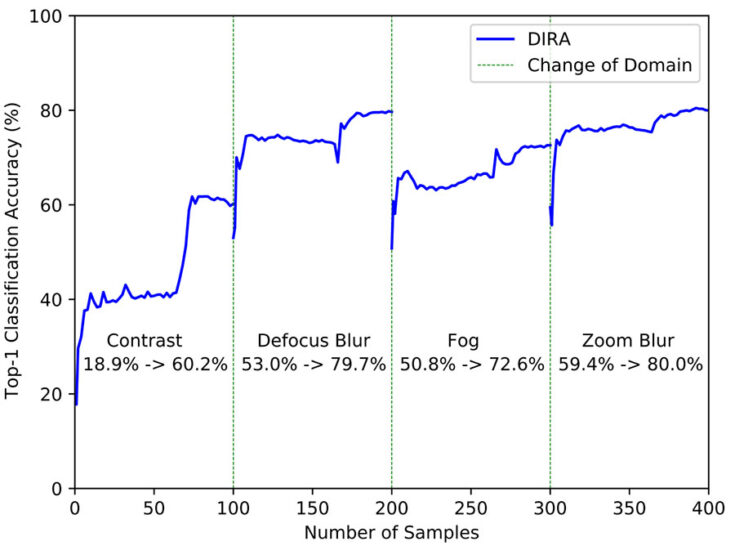
Figure 2: dynamic adaptation scenario example for DIRA, a method developed as part of this PhD ICASE, to different target domains taken from CIFAR-10C dataset. Pre-trained ResNet-26 model on CIFAR-10 adapts to different corruption examples from CIFAR-10C dataset at the highest severity (level 5), to show how well DIRA can dynamically adapt to operational domains. Figure taken from A Ghobrial et al. ‘DIRA: Dynamic Domain Incremental Regularised Adaptation’ arXiv preprint arXiv: 2205.00147 (2023).
ICASE experience
Having the co-supervision of a reputable industrial partner, like Thales UK, who is very active in the field of autonomous systems, provided me with the necessary feedback during my research journey to ensure I produce meaningful research that have significant benefits to the field of research.
The involvement of Thales UK provided exclusive opportunities to present this PhD research in Thales based industrial conferences to a wide range of experienced researchers and developers throughout the firm to provide further feedback and adopt any relevant developed technologies from our research to real world systems being developed.
Furthermore, from the research developed in this PhD and involvement of Thales UK, I was fortunate to do a collaboration for six months between the Trustworthy Systems Lab, Thales UK, and partners from the Interuniversity Microelectronics Centre in Belgium under a prosperity partnership project provided by Thales UK and University of Bristol and funded by EPSRC.
The Prosperity Partnership, ‘Thales-Bristol Partnership in Hybrid Autonomous Systems Engineering (T-B PHASE) launched in October 2017 and the project concluded in March 2023.
This project aimed to deliver design principles and processes for hybrid (human-machine) autonomous systems engineering. The research programme addressed the challenge of engineering confidence in hybrid autonomous systems, combining fundamental research studies with applications to live use cases within Thales. These included digital rail, maritime mission systems, intelligent surveillance and reconnaissance and unmanned traffic management.
Find out more about the T-B PHASE project on the University of Bristol website.